Le site n'est pas supporté par votre navigateur. Veuillez mettre à jour le navigateur ou télécharger un autre
Tout est déjà vendu

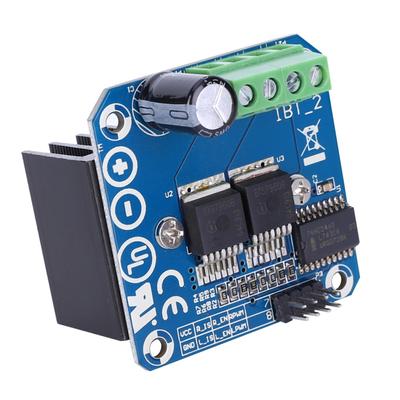
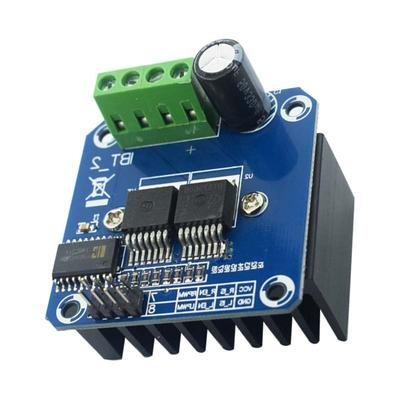
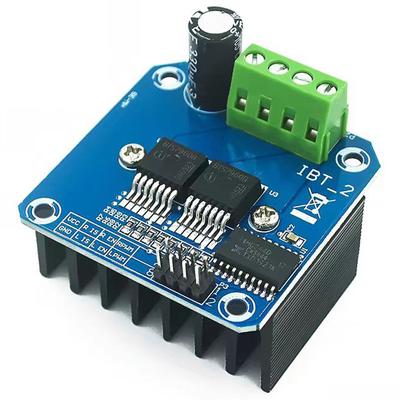
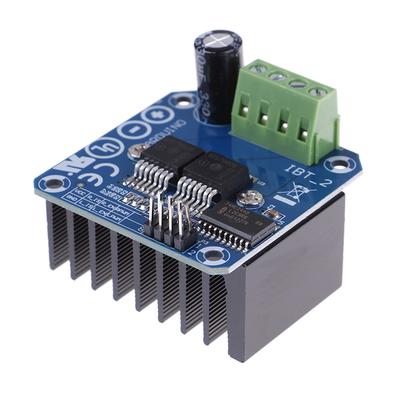
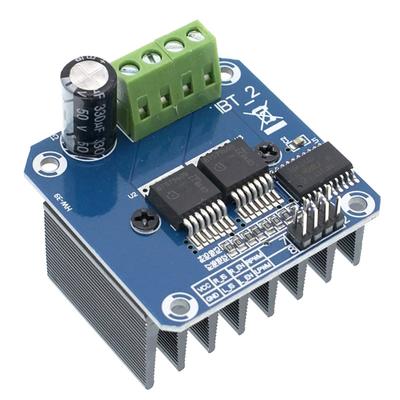
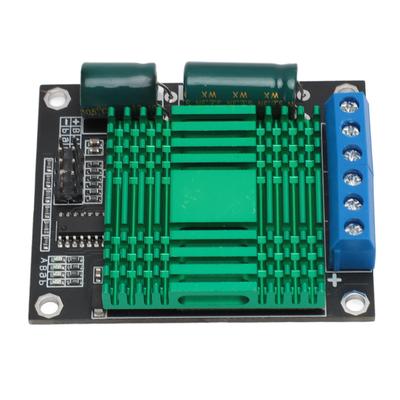
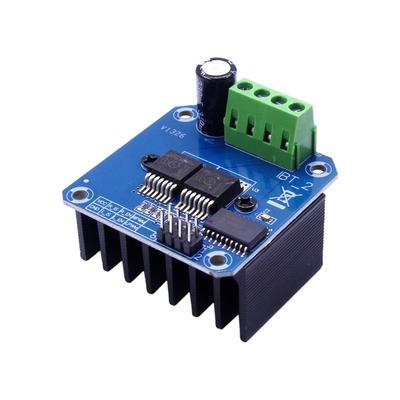
5,5 V à 27 V Module de Commande Moteur Haute Puissance BTS7960 Driver Moteur Module de Commande Moteur Électronique DIY
Boutique
Xuing364Produits similaires